MOTORI
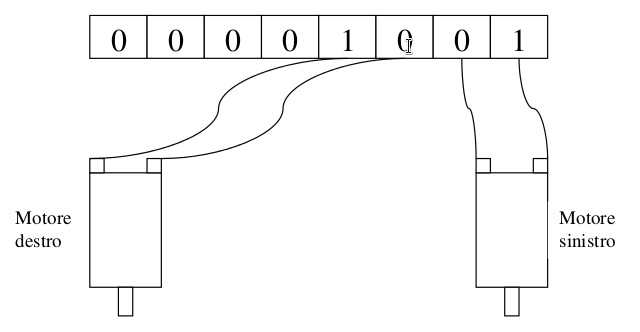
Vi ricordo che la porta RA0 corrisponde al piedino 17 ed RA1 al piedino 18 del PIC, che a loro
volta sono collegate al motorino della ruota sinistra.
In questo modo noi andiamo a fornire una tensione positiva ad un capo del motori ed una tensione
negativa all’altro capo.
Questa condizione farà girare il motorino sinistro.
Lo stesso discorso vale per il motorino di destra che è collegato ai piedini 1 e 2 del PIC e quindi alle
porte RA1 ed RA2.
Per chiarire il tutto vi è di aiuto la foto sottostante:
Scritto il programma, lo compiliamo e scarichiamo all’interno del PIC, come abbiamo fatto in
precedenza, poi montiamo il PIC sul microrobot Poor e lo accendiamo, il microrobot deve andare
avanti senza mai fermarsi.
POSSIBILI PROBLEMI:
Il microrobot non si muove.
Controllate se le batterie sono tutte cariche.
Controllate se i collegamenti sono corretti, aiutatevi con lo schema elettrico.
Controllate se ci sono dei falsi contatti.
Il microrobot va indietro.
Invertite i fili del servo destro (il rosso con il nero ed il nero con il rosso) ed invertite i fili del servo
sinistro (il rosso con il nero ed il nero con il rosso).
Oppure invertire i bit nell’istruzione PortB =.
Il microrobot va a sinistra.
Invertite i fili del servo sinistro (il rosso con il nero ed il nero con il rosso).
Oppure invertire i bit nell’istruzione PortB =.
Il microrobot va a destra.
Invertite i fili del servo destro (il rosso con il nero ed il nero con il rosso).
Oppure invertire i bit nell’istruzione PortB =.
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
![]() Aggiunta la sezione corsi.
Aggiunta la sezione corsi.
![]() Aggiunto il programma sulla telemetria (in fase di sviluppo).
Aggiunto il programma sulla telemetria (in fase di sviluppo).