MOTORI
Con lo stesso ragionamento scriviamo un programma per far andare indietro il microrobot.
#CHIP 16F84, 4 'Tipo di PIC utilizzato
Dir PORTA OUT 'Definisco le porte d'uscita
Dir PORTB IN 'e d'ingresso
PortA = b'00000110' 'Alimento gli amplificatori per i motorini
END 'Fine del programma
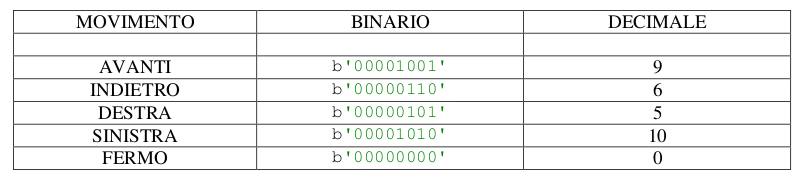
Abbiamo solo scambiato i valore degli ultimi 4 bit. In sintesi abbiamo invertito l’alimentazione dei motorini e quindi gireranno nel senso opposto. Vi ricordo che al posto del codice binario è possibile inserire il valore convertito in decimale, in questo caso al posto di b'00000110' possiamo mettere il numero 6. Se vogliamo far girare a sinistra il microrobot dobbiamo mandare avanti il motore di destra ed indietro il motore di sinistra, viceversa per farlo girare a destra. Quindi per far girare a sinistra il microrobot, dovremmo cambiare il terzo ed il quarto bit.
#CHIP 16F84, 4 'Tipo di PIC utilizzato
Dir PORTA OUT 'Definisco le porte d'uscita
Dir PORTB IN 'e d'ingresso
PortA = b'00001010' 'Alimento gli amplificatori per i motorini
END 'Fine del programma
Mentre per farlo girare a destra il valore binario è il seguente: PortA = b'00000101'
Ricapitolando:
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
![]() Aggiunta la sezione corsi.
Aggiunta la sezione corsi.
![]() Aggiunto il programma sulla telemetria (in fase di sviluppo).
Aggiunto il programma sulla telemetria (in fase di sviluppo).