Aspirapolvere robotizzato.
Il robot è stato realizzato per una mia necessitá :-).
Avevo bisogno di un aiuto per le pulizie e quindi ho pensato di costruire questo
robot.
Dati tecnici.
La scheda "madre" è della basicstamp, piú precisamente del robot
della deagostini.
L'aspirapolvere è della Black&Dacker, un modello vecchio che stavo buttando.
Le ruote sono, sempre del robot della deagostini.
La scheda e le ruote mi sono stati regalati da un mio amico e non sapevo
proprio che farne, poi mi è venuto il "lampo di genio" :-).
Galleria fotografica.
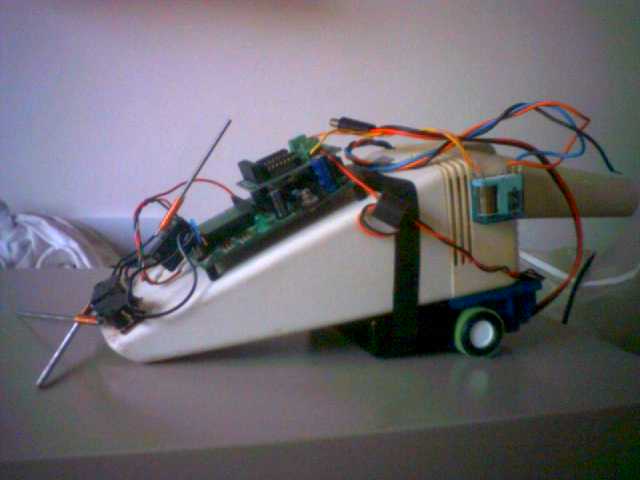
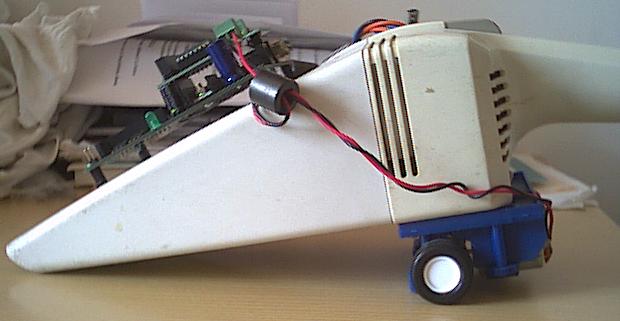
Ho unito il tutto ed
ecco il risultato.
La batteria per la scheda è posizionata sotto l'aspirapolvere (vicino le ruote).
Gli interruttori sono 3 sinistra, destra e centrale.
L'interruttore centrale serve a "sentire" gli ostacoli poco alti, dove il
microrobot non passa.
La batteria per l'aspirapolvere è interna è viene ricaricata con i fili
Arancione e nero, posti vicino al manico.
Il relè, sempre vicino al manico, serve ad attivare l'aspirapolvere quando il
microrobot viene acceso.
Se notate intorno alle ruote vedrete degli elastici verdi, li ho messi perchè il
microrobot scivolava con il pavimento liscio e quindi non girava bene.

News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.