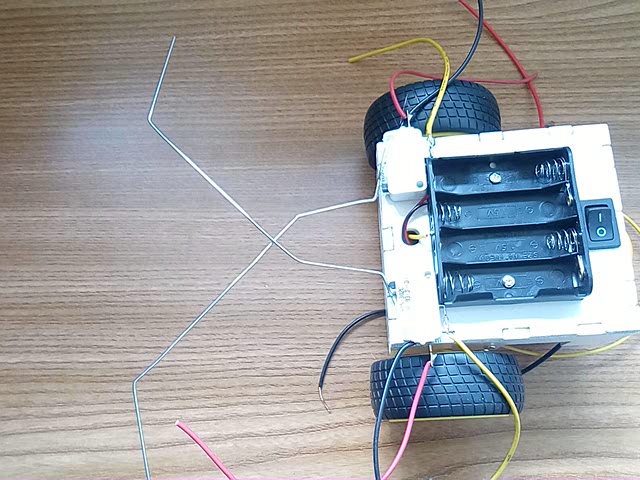
Per creare i baffi ho utilizzato 2 fermacarte grandi.
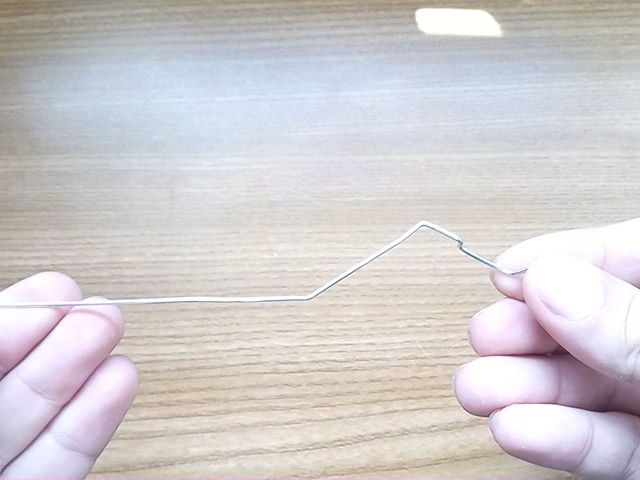
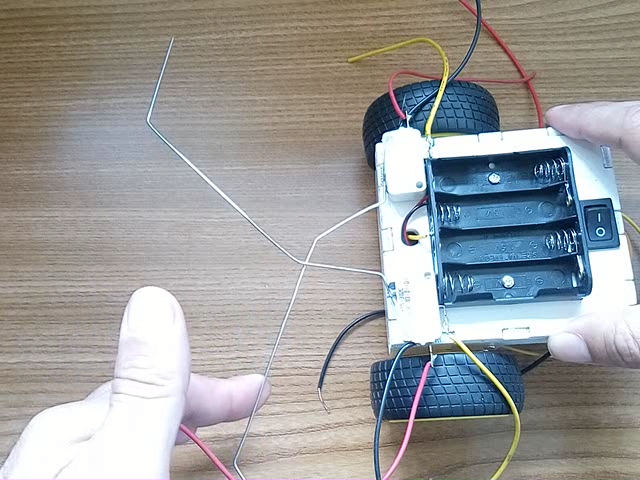
Piegati come in foto, possiamo coprire tutta la superficie del robot ed attivare i contatti del robot.
Con un po di colla a caldo, fissate i baffi alla base ma lasciateli liberi di muoversi.
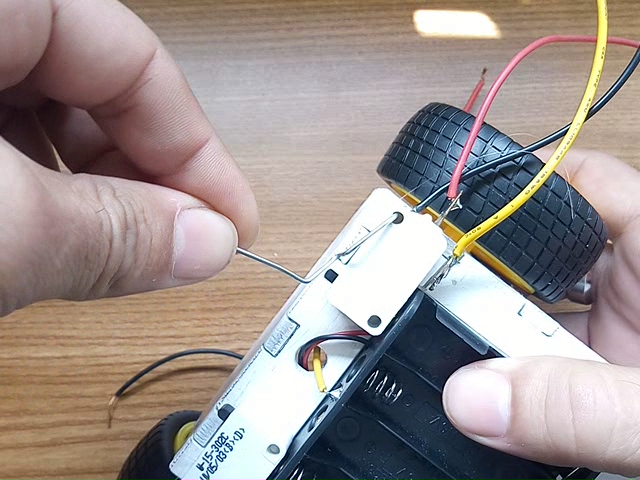
Incrociate i baffi come in foto per far si che, gli ostacoli centrali vengano rilevati senza problemi.
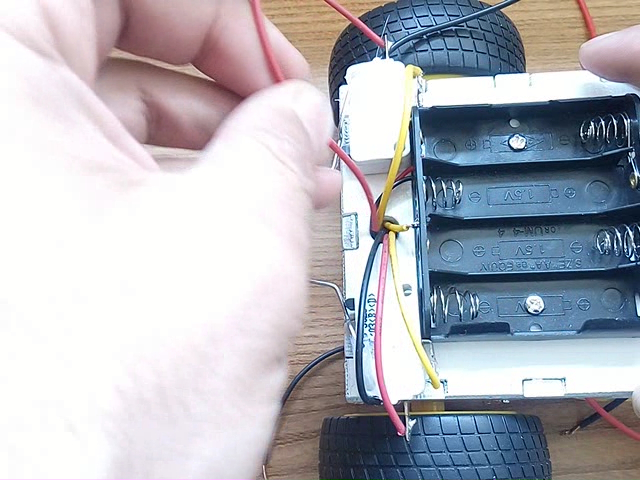
Ricordatevi che gli switch sono incrociati, quindi l'ostacolo segnalato a destra chiude lo switch a sinistra e viceversa.
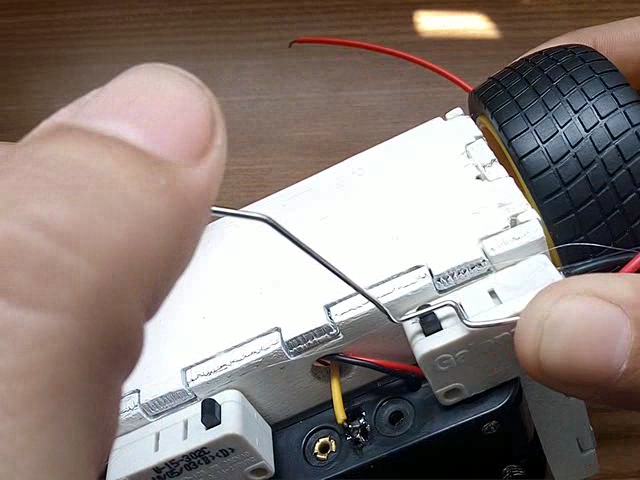
Facciamo passare i cavi all'interno del foro, come in foto
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
![]() Aggiunta la sezione corsi.
Aggiunta la sezione corsi.
![]() Aggiunto il programma sulla telemetria (in fase di sviluppo).
Aggiunto il programma sulla telemetria (in fase di sviluppo).