Questa scheda permette di pilotare il braccio del microrobot, in modo da aprirlo e chiuderlo per afferrare un oggetto.
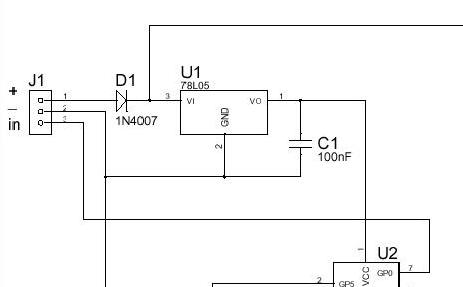
L'alimentazione è affidata ad un diodo D1 ed allo stabilizzatore
U1 da 5 Volt, che andrà a fornire energia sia al microcontrollore che al ponte
ad H.

Per pilotare il braccio è stato usato un microcontrollore (U2)
che permette di avere due modalità di impiego: La prima è l' apertura e chiusura
della pinza con un solo impulso, mentre la seconda è l'apertura della pinza con
un primo impulso e la chiusura della pinza con un secondo impulso.
Le due modalità si possono selezionare tramite il ponticello
JMP1.
Il pilotaggio del motore è effettuato dalle porte GP5 e GP4 del
microcontrollore.
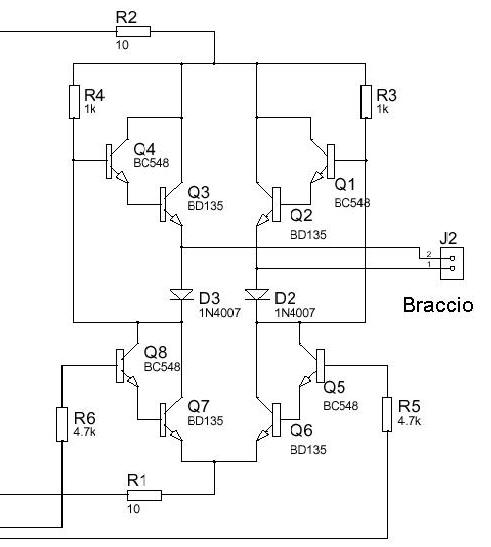
Il ponte ad H ha le stesse funzioni descritte nella scheda di potenza, in questo
caso si pilota un motore che permette l'apertura e la chiusura del braccio.
Gli ingressi del ponte ad H sono collegati alle resistenze R6 ed
R5 mentre il motore è collegato al connettore J2.
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
![]() Aggiunta la sezione corsi.
Aggiunta la sezione corsi.
![]() Aggiunto il programma sulla telemetria (in fase di sviluppo).
Aggiunto il programma sulla telemetria (in fase di sviluppo).