PULSEOUT
L’istruzione PULSEOUT serve a mantenere alto il piedino del PIC impostato per poi spostarlo al livello
logico basso.
Sintassi:
PULSEOUT pin, tempo unità
Vediamo un pezzo di codice per capire meglio il funzionamento:
#CHIP 16F84, 4 'Tipo di PIC utilizzato
DIR PORTB.1 OUT
PULSEOUT PORTB.1, 1 sec 'Accendo il led per 1 sec
'Fine programma
END
In questo caso la porta PORTB.1 rimarrà allo stato alto per 1 secondo per poi riscendere allo stato
basso.
Una volta scaricato il programma nel PIC premete il tasto di reset e vedrete il led accendersi per 1
secondo e poi rimanere spento.
Questa istruzione è molto comoda quando vogliamo creare una frequenza da utilizzare per i circuiti
di clock degli integrati o per sincronizzare dei componenti come i ricevitori infrarossi o le capsule
ad ultrasuoni.
Per generare una frequenza di 2 HZ ovvero 2 onde in un secondo dobbiamo fare quanto segue:
Dividere il tempo per la frequenza 1 sec / 2 HZ = 0,5 (che equivale a 500 millesimi di secondo) ed
usare il risultato come base per i tempi, come nell’esempio:
#CHIP 16F84, 4 'Tipo di PIC utilizzato
DIR PORTB.1 OUT
Ciclo:
PULSEOUT PORTB.1, 500 ms 'Accendo il led per 500 millisecondo
WAIT 500 ms 'Attendo 500 millisecondi
GOTO Ciclo
END 'Fine programma
In questo caso il led lampeggerà 2 volte in 1 secondo, non cercate di aumentare la frequenza perchè
l’occhio umano non noterà la differenza tra un led acceso ed un led che lampeggia a 50 volte in 1
secondo (50 HZ).
L’istruzione PULSEOUT determinerà quanto tempo l’uscita deve trovarsi a livello alto mentre
l’istruzione WAIT quanto tempo dovrà mantenere il livello basso.
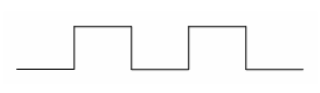
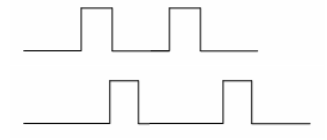
Volendo disegnare l’onda generata la sua forma assomiglierà alla seguente:
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.