Questa scheda permette di amplificare i deboli segnali provenienti dal microcontrollore per applicarli ai motori od alle altre schede e di amplificare i segnali provenienti dai sensori per portarli al microcontrollore.
PONTE AD H
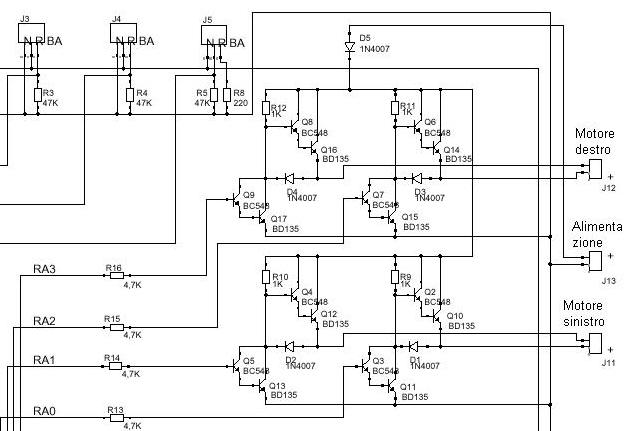
Il ponte ad H pilotare un motore in continua variandone il senso di marcia.
Supponiamo di avere uno schema simile al seguente, dove un motore (M) viene alimentato da una tensione positiva (+) e negativa (-) e comandato da 4 interruttori (A - B - C D):
Chiudendo gli interruttori A e D e lasciando aperti gli interruttori B C il
motore girerà in un senso di marcia, ipotizziamo antiorario, chiudendo gli
interruttori B e C e lasciando aperti gli interrutori A D il motore girerà in
senso inverso ovvero orario.
Nello schema del microrobot gli interruttori sono sostituiti dai transistor
rispettivamente:
Interruttore A --> Transistor Q8 - Q16
Interruttore B --> Transistor Q6 - Q14
Interruttore C --> Transistor Q9 - Q17
Interruttore D --> Transistor Q7 - Q15
Il pilotaggio degli interruttori è assegnato alle porte RA0 - RA1 - RA2 - RA3
del microcontrollore.
Per il motore sinistro il discorso è analogo al motore destro.
SENSORI MECCANICI ED INSEGUITORI DI LINEA
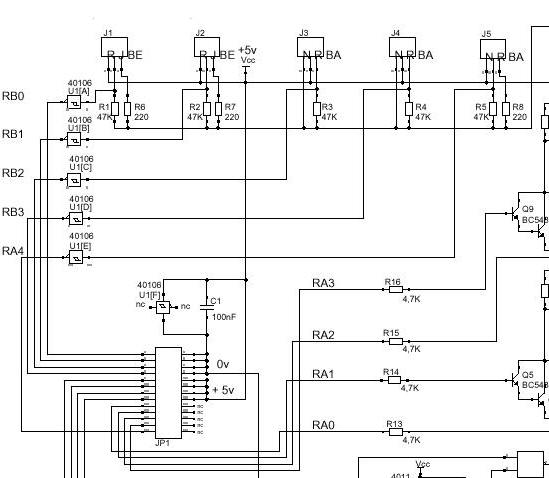 IL microrobot è dotato di due sensori meccanici per
rilevare gli ostacoli tramite contatto, questi sensori vengono collegati i
connettori J3 e J4.
IL microrobot è dotato di due sensori meccanici per
rilevare gli ostacoli tramite contatto, questi sensori vengono collegati i
connettori J3 e J4.In stato di riposo i sensori meccanici fornisce un segnale di valore zero sulle porte RB2 ed RB3, nell'istante in cui il contatto viene chiuso per essersi scontrato con un oggetto, il valore sale a 5 Volt.
Per i sensori di linea il discorso è analogo, solo che i valori sono invertiti, quindi quando il sensore percepisce una linea bianca, nei connettori J1 e J2 avremmo i 5 Volt mentre in presenza di una linea nera il valore sarà zero.
SENSORI LUCE ED AUSILIARI
 I connettori J6 J7 sono collegate alla scheda lue che
fornisce una tensione di 5 volt quando il diodo associato alla porta non percepisce
la luce, per maggior dettagli consultare lo schema dei sensori luce.
I connettori J6 J7 sono collegate alla scheda lue che
fornisce una tensione di 5 volt quando il diodo associato alla porta non percepisce
la luce, per maggior dettagli consultare lo schema dei sensori luce.
ALTOPARLANTE
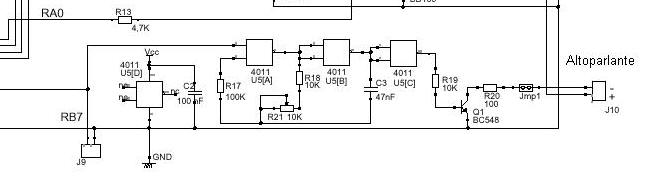 L'uscita J9 ha una duplice funzione, quella di ricevere segnali
dalla scheda che pilota il braccio o di generare un suono da applicare all'uscita J10.
L'uscita J9 ha una duplice funzione, quella di ricevere segnali
dalla scheda che pilota il braccio o di generare un suono da applicare all'uscita J10.Il suono è generato dall'integrato 4011, in questo caso è utilizzato come generatore di onda quadra variabile dal trimmer R21, il transistor Q1 è utilizzato per amplificare il segnale dell'integrato per essere applicato all'altoparlante.
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.