Proviamo il nostro microrobot.
Aprite il blocco note e copiate questa sequenza di
caratteri.
:020000040000FA
:020000000528D1
:06000A008316073081009F
:10001000FF3086001030850083121B200E28080058
:100020000800080008000800080008000800080090
:100030000630850008000930850008000A30850078
:1000400008000530850008000030850008000830F1
:100050008500080001308500080083120C308C00F8
:10006000322008000B11D83081000B1D35288C0B75
:1000700032280800831232308C003F2008000B1118
:10008000D83081000B1D42288C0B3F2808008312BA
:1000900064308C004C2008000B11D83081000B1DFF
:1000A0004F288C0B4C280800831296308C00592066
:1000B00008000B11D83081000B1D5C288C0B5928CF
:1000C00008008312C8308C00662008000B11D8305D
:1000D00081000B1D4F288C0B662808008312FA3014
:1000E0008C00732008000B11D83081000B1D76287E
:0600F0008C0B73280800D0
:02400E00F13F80
:00000001FF
Salvate il FILE con il nome AVANTI e cambiate
l'estensione del FILE da TXT a HEX.
Inserite il PIC nel programmatore (fate attenzione alla
tacca di riferimento), date alimentazione alla scheda e collegate il
programmatore alla porta parallela, avviate ICPROG.
APRI ed andate a cercare il FILE che avete appena creato
con il blocco note.
Ora premete F5 e rispondete SI alla domanda di
programmare il PIC.
Vedrete una barra che scorre ed il led di programmazione
che si accende.
Finita la programmazione il led si spegne, ora potete
togliere l'alimentazione ed il PIC dallo zoccolo.
Montate il microcontrollore sul microrobot ed accendete
l'interrutto, (assicuratevi che le batterie siano cariche).
Il microrobot andrà avanti.
POSSIBILI PROBLEMI
Il microrobot non si muove
Controllate se le batterie sono tutte cariche.
Controllate se i collegamenti sono corretti, aiutatevi
con lo schema elettrico.
Controllate se ci sono dei falsi contatti.
Il microrobot va indietro.
Invertite i fili del servo destro (il rosso con il nero
ed il nero con il rosso) ed invertite i fili del servo sinistro (il rosso con
il nero ed il nero con il rosso).
Il microrobot va a sinistra.
Invertite i fili del servo sinistro (il rosso con il nero
ed il nero con il rosso).
Il microrobot va a destra.
Invertite i fili del servo destro (il rosso con il nero
ed il nero con il rosso).
Ora accantonate il microrobot ed iniziamo con la
programmazione.
Iniziamo con dei programmi che ci aiutano a capire i
concetti di programmazione per poi passare ai vari linguaggi veri e propri.
Dobbiamo scaricare un programma FREE chiamato MONTYPRO,
lo trovate nella sezione programmi --> robotica.
Per funzionare MONTYPRO ha bisogno del compilatore della
microchip, si trova all'interno dell'ambiente di sviluppo MPLAB e lo potete
scaricare qui:
http://www.microchip.com.
Se volete il solo compilatore lo potete scaricare dalla
sezione programmi --> robotica.
Scaricato il programma ed il compilatore, scompattatelo ed
installate MONTYPRO.
Eseguite MONTYPRO, dovrete avere un messaggio che vi
avverte della mancanza del compilatore.
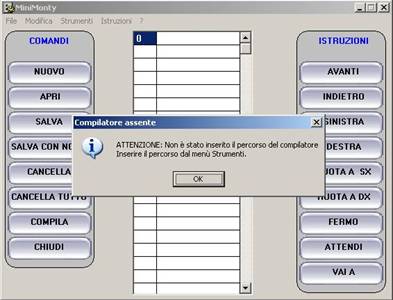
Fate click su OK ed andate nel menù STRUMENTI --> COMPILATORE, si aprirà una finestra di
dialogo, andate a cercare il compilatore scaricato e fate click su APRI.
Ora MONTYPRO è pronto per funzionare.
Facciamo il nostro primo programma, formato da una sola
istruzione, fate click nel pulsante AVANTI, si trova a destra del programma.

Se non avete scaricato MINIMONTY potete copiare il FILE
sottostante con il metodo descritto sopra.
FILE ESADECIMALE.
:020000040000FA
:020000000528D1
:06000A008316073081009F
:10001000FF3086001030850083121B200E28080058
:100020000800080008000800080008000800080090
:100030000630850008000930850008000A30850078
:1000400008000530850008000030850008000830F1
:100050008500080001308500080083120C308C00F8
:10006000322008000B11D83081000B1D35288C0B75
:1000700032280800831232308C003F2008000B1118
:10008000D83081000B1D42288C0B3F2808008312BA
:1000900064308C004C2008000B11D83081000B1DFF
:1000A0004F288C0B4C280800831296308C00592066
:1000B00008000B11D83081000B1D5C288C0B5928CF
:1000C00008008312C8308C00662008000B11D8305D
:1000D00081000B1D4F288C0B662808008312FA3014
:1000E0008C00732008000B11D83081000B1D76287E
:0600F0008C0B73280800D0
:02400E00F13F80
:00000001FF
Ora salviamo il FILE facendo click sul pulsante SALVA
CON NOME e poi compiliamo il programma con il pulsante COMPILA.
Verremo avvertiti da un messaggio che la compilazione è
stata terminata.
ATTENZIONE non salvate il FILE in percorsi troppo lunghi
altrimenti il compilatore potrebbe generarvi degli errori.
Andiamo nel percorso dove abbiamo salvato il FILE, la
situazione dovrà essere la seguente:
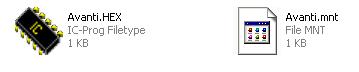
Un FILE con estensione HEX ed un FILE con estensione MNT.
Il primo FILE è l'esadecimale da scaricare all'interno
del PIC tramite il programmatore, il secondo è il nostro programma salvato e
che potremmo riaprire e modificare in seguito.
Scaricato il programma HEX all'interno del PIC ed il
nostro microrobot andrà avanti.
Il microrobot esegue delle istruzioni da noi impostate
uno dopo l'altra.
Esempio:
Avanti
Destra
Sinistra etc.
Queste istruzioni devono essere inserite in modo corretto
altrimenti il risultato finale non sarà quello desiderato, vediamo come e
perchè.
Aprite MINIMONTY ed inserite 2 istruzioni, AVANTI ed
INDIETRO.
Salvate, compilate e scaricate il programma nel PIC come
descritto in precedenza.

FILE ESADECIMALE
:020000040000FA
:020000000528D1
:06000A008316073081009F
:10001000FF30860085018312093085000630850097
:100020001028831232308C00162008000B11D830B3
:1000300081000B1D19288C0B1628080083126430D0
:100040008C00232008000B11D83081000B1D2628BE
:100050008C0B23280800831296308C003020080077
:100060000B11D83081000B1D33288C0B3028080071
:100070008312C8308C003D2008000B11D83081005D
:100080000B1D26288C0B3D2808008312FA308C00AB
:100090004A2008000B11D83081000B1D4D288C0B15
:0400A0004A280800E2
:02400E00F13F80
:00000001FF
Vedrete che il microrobot NON andrà avanti ma solamente
indietro perchè?
Il programma è esatto ma verrà eseguito molto velocemente
e quindi noi vedremo solo l'ultima operazione inserita, ovvero INDIETRO.
Per ottenere il nostro risultato dovremo ragionare in
modo differente ed inserire le seguenti istruzioni:
AVANTI, ATTENDI 1sec, INDIETRO.

FILE ESADECIMALE
:020000040000FA
:020000000528D1
:06000A008316073081009F
:10001000FF30860085018312093085000630850097
:100020001028831232308C00162008000B11D830B3
:1000300081000B1D19288C0B1628080083126430D0
:100040008C00232008000B11D83081000B1D2628BE
:100050008C0B23280800831296308C003020080077
:100060000B11D83081000B1D33288C0B3028080071
:100070008312C8308C003D2008000B11D83081005D
:100080000B1D26288C0B3D2808008312FA308C00AB
:100090004A2008000B11D83081000B1D4D288C0B15
:0400A0004A280800E2
:02400E00F13F80
:00000001FF
L'istruzione ATTENDI 1s, permette l'avanzamento del
microrobot di 1 secondo per poi passare all'istruzione INDIETRO.
Con questo sistema si possono creare tutti i programmi
che vogliamo.
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.