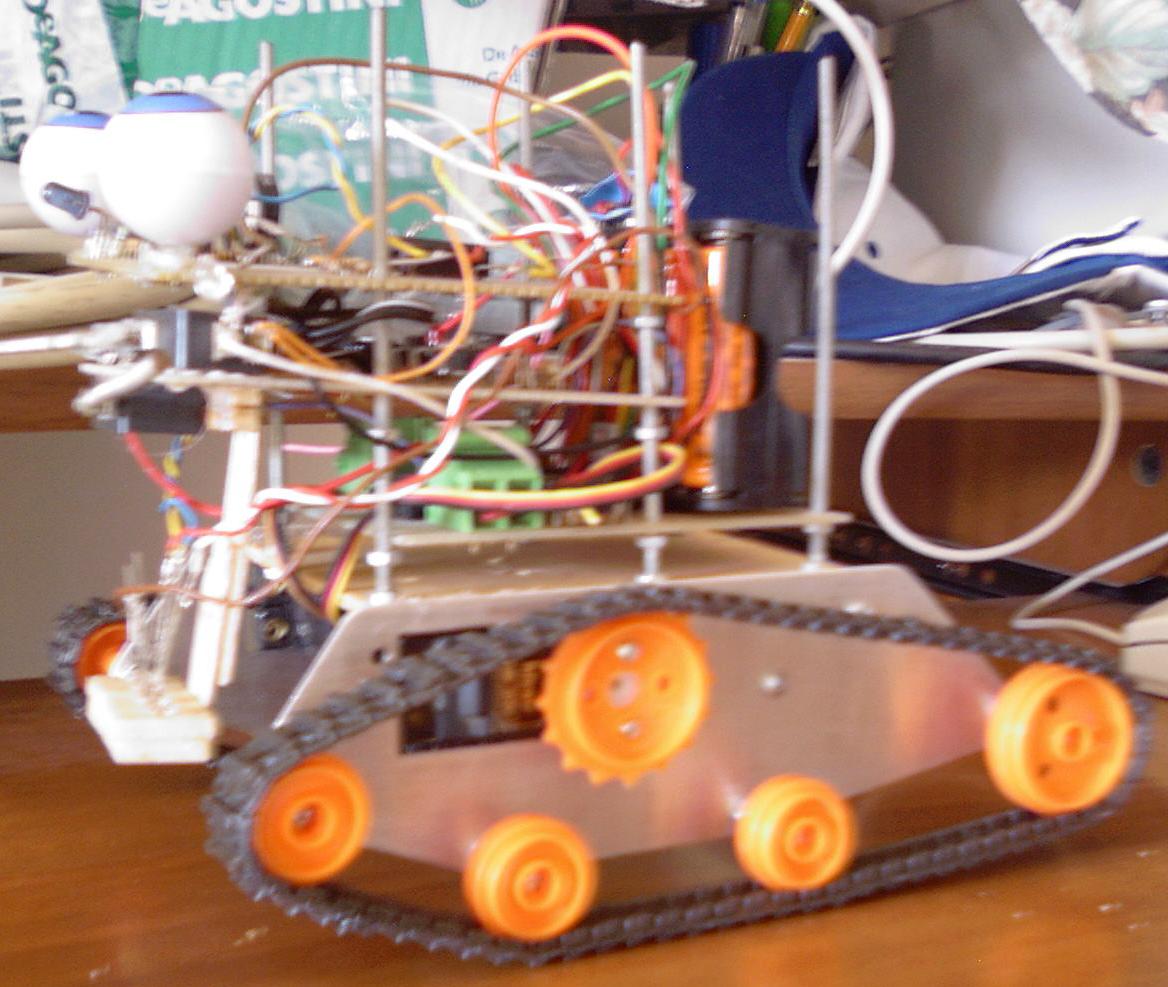
Sostituire le ruote con dei cingoli.
In commercio esistono dei cingoli per il robot BoeBot
facilmente adattabili al Poor.
Vediamo come:
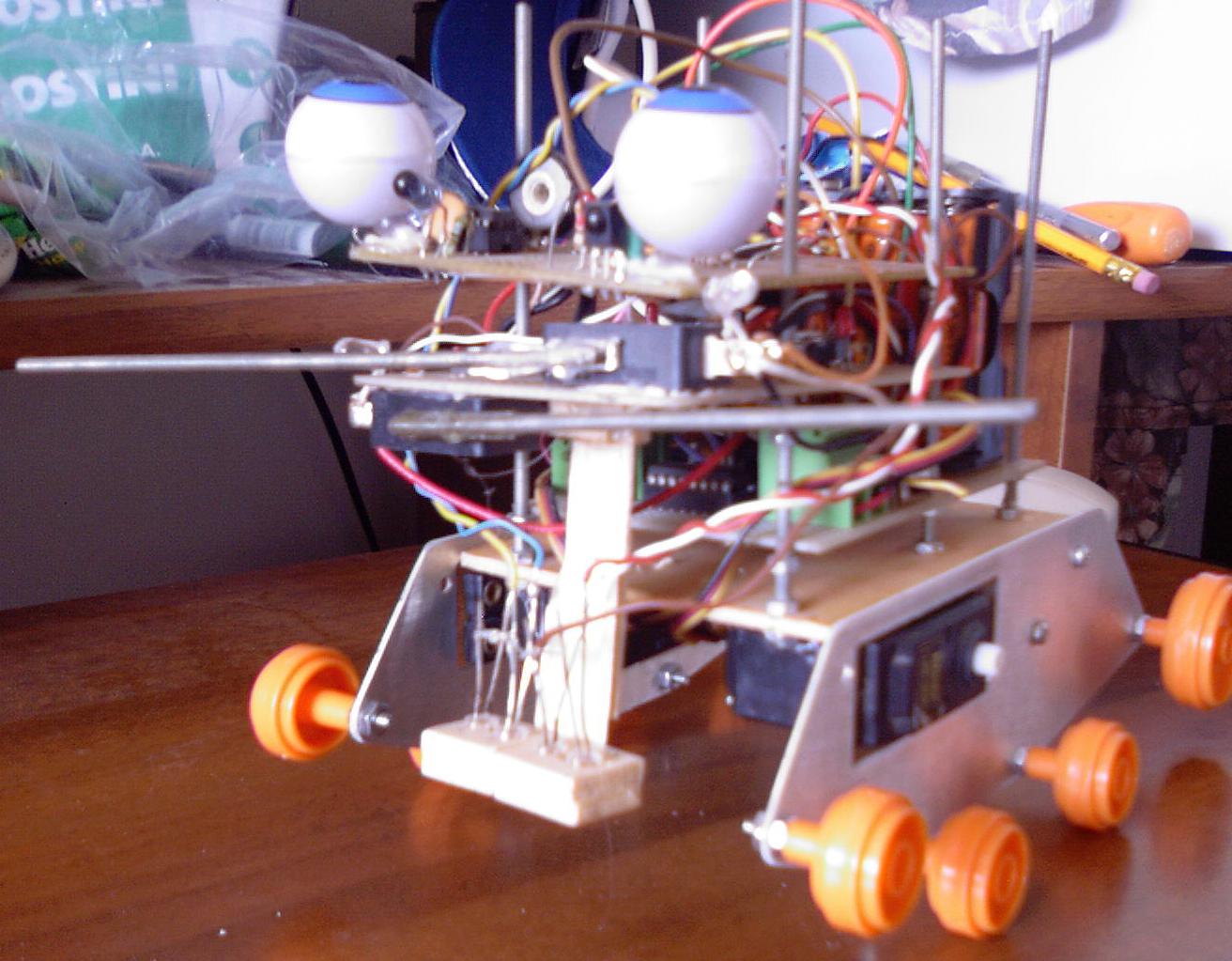
Smontate le ruote ed il ruotino posteriore, smontate i servi e rimontateli in modo da avere il pignone
verso la parte posteriore del microrobot, come in foto.
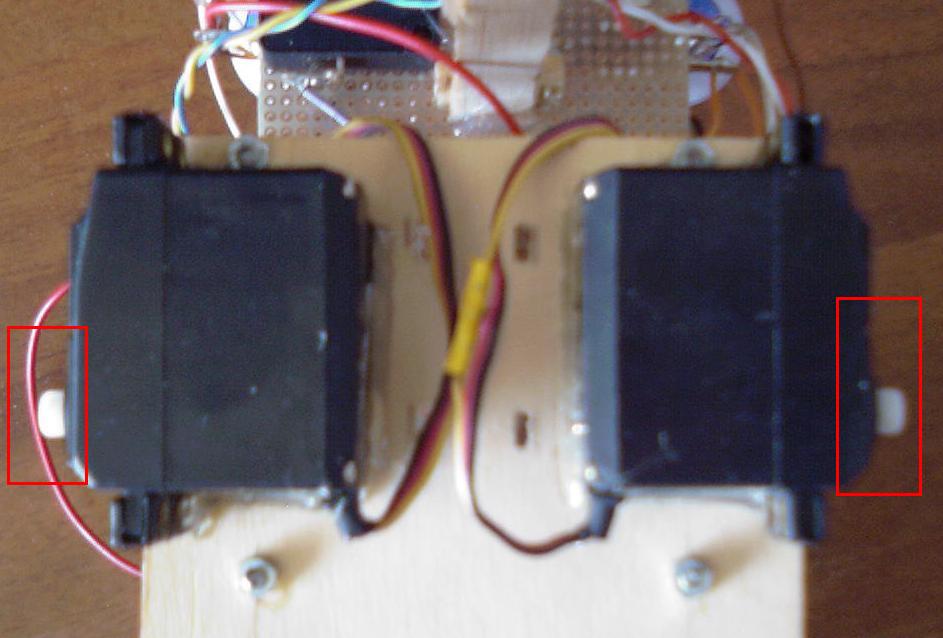
Fissate i servi con delle fascette o della colla calda ma cercate
di tenere il servo a filo con il legno sottostante.
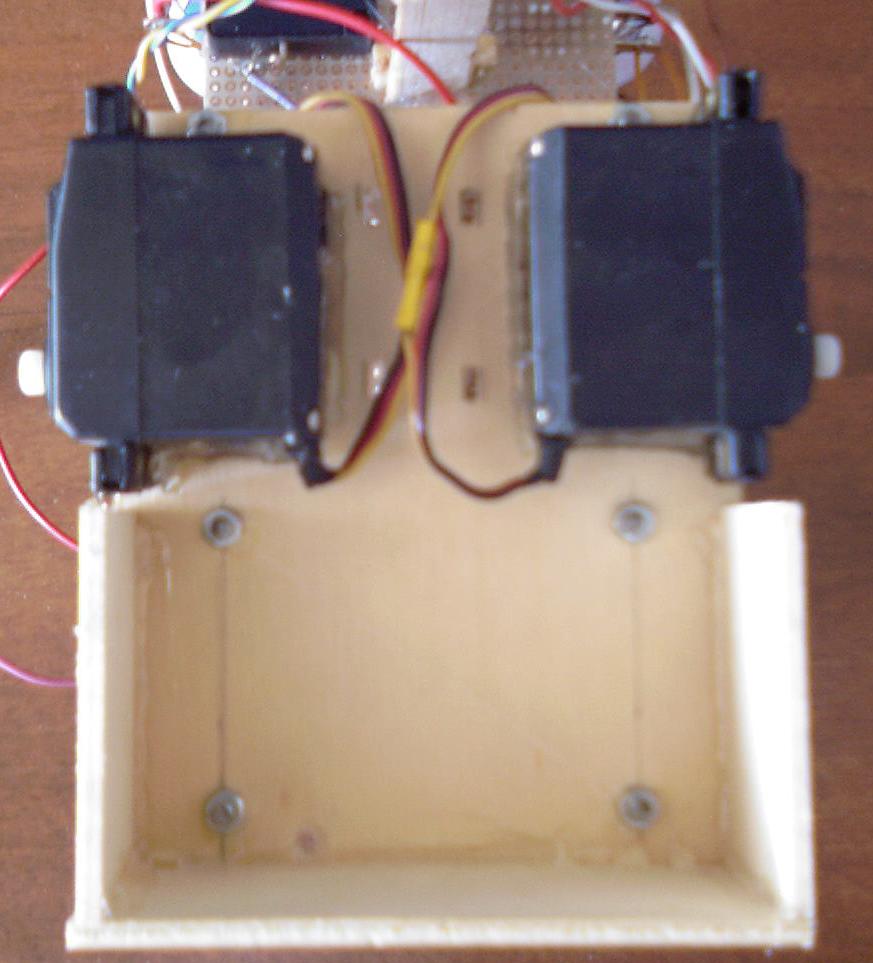
Ora tagliate 3 pezzi di compensato da 3mm con le seguenti
dimensioni:
Due da 3,5 cm X 5 cm.
Uno da 3,5 cm X 9 cm.

Incollate i tre pezzi di legno in modo da formare una scatola come in foto, sar� la struttura dei cingoli.
Iniziate a montare i cingoli come descritto nel libretto di istruzioni presente nella scatola di montaggio.
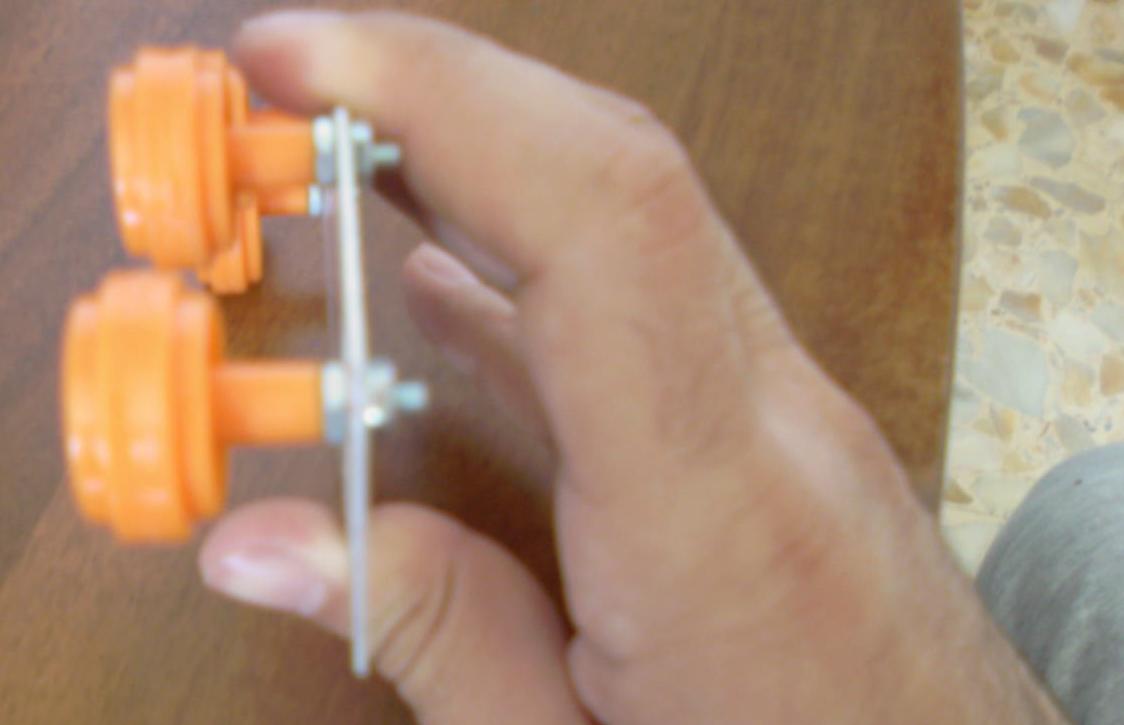
Prendere le viti lunghe 2 cm ed i dati relativi.

Fissate il primo dado ma non lo stringete troppo, lasciate un millimetro circa di distanza.

Adesso fissate la corona non dentata (arancione) nella base di alluminio
stringendo il secondo bullone.
Quando avete finito controllate che il perno arancione giri
liberamente, se non lo fa allentate il primo dado.
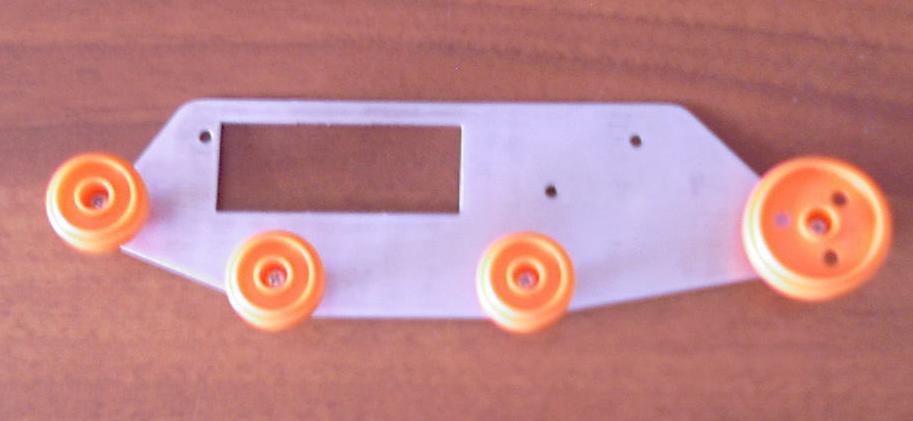
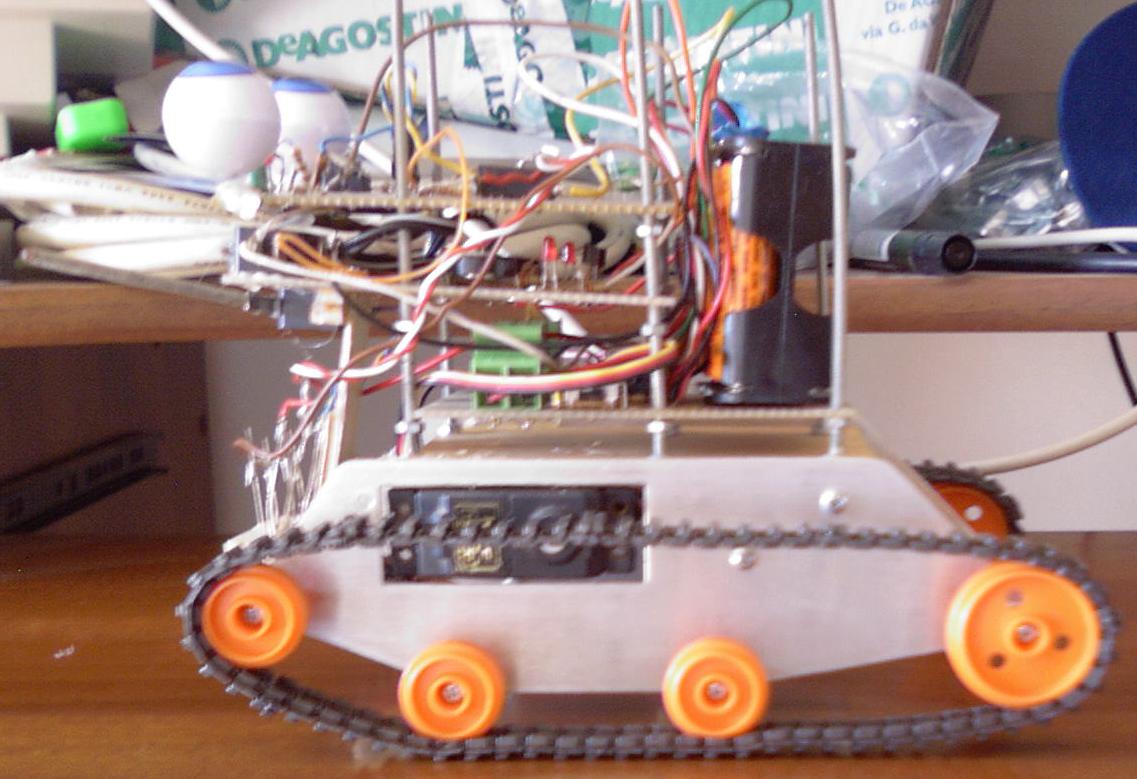
Montate con lo stesso sistema tutti gli altri perni per
avere un aspetto simile a quello della foto.
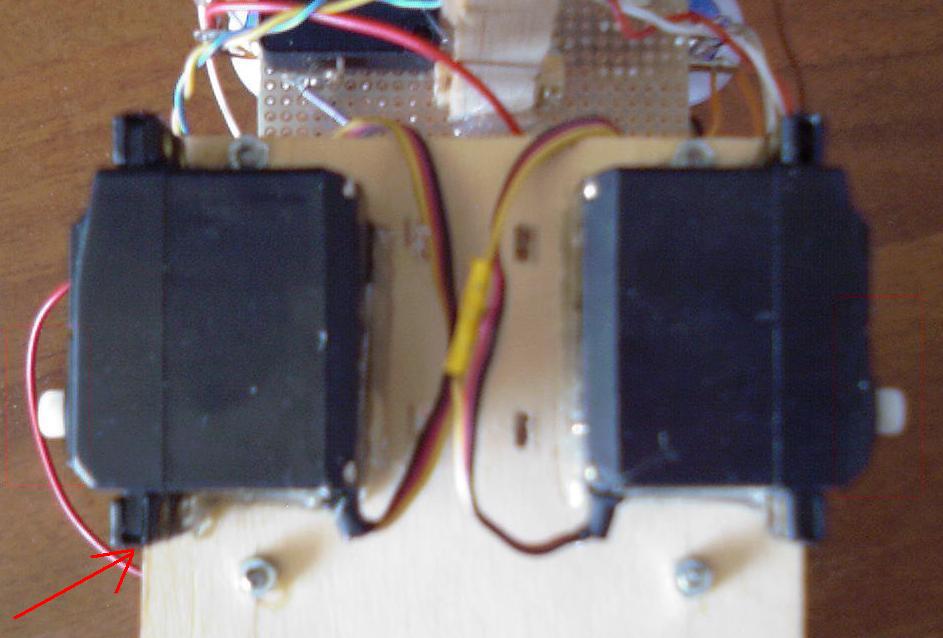
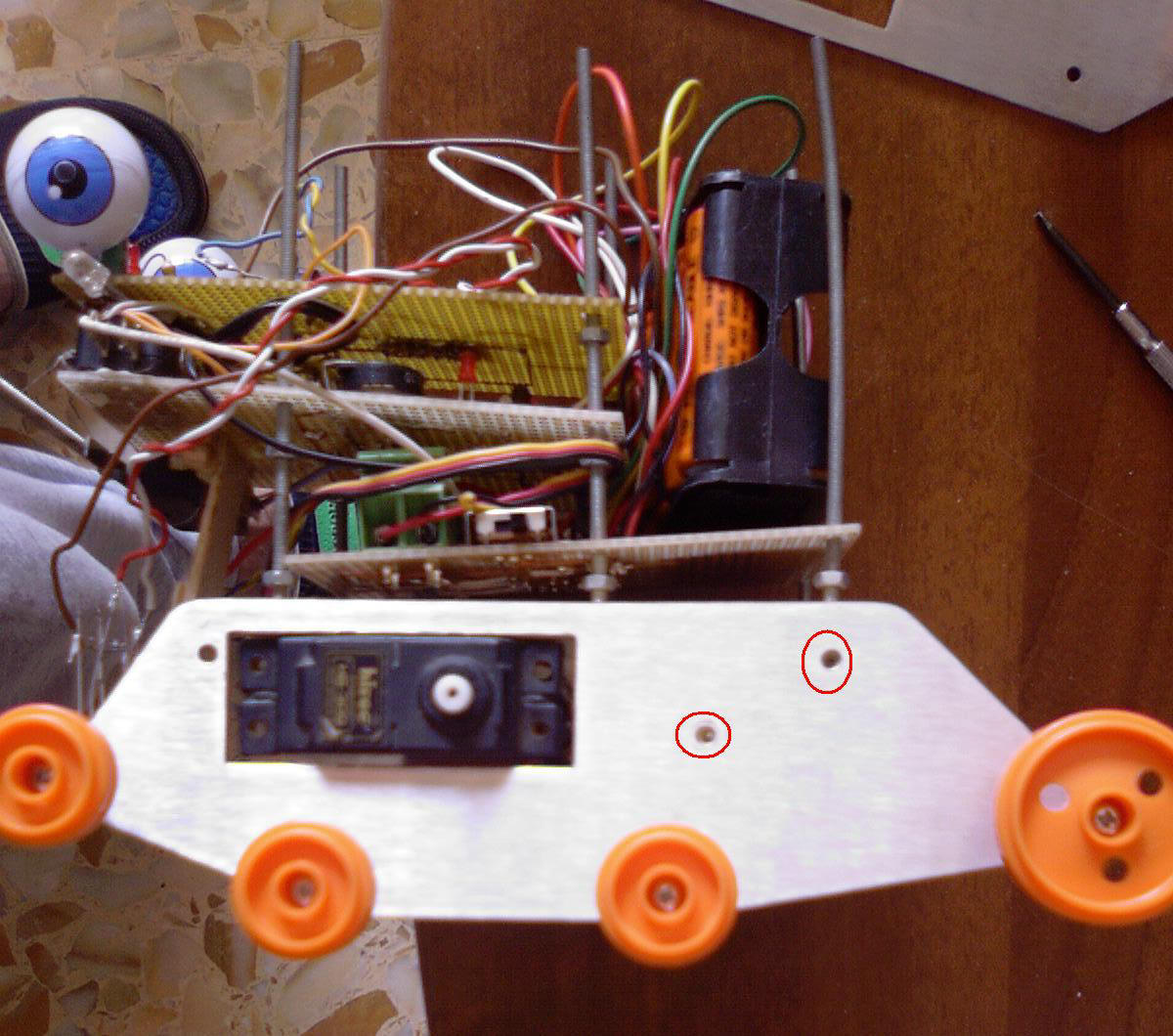
Ora montate il supporto in alluminio sul robot e forate il
compensato per inserire le viti come in foto.
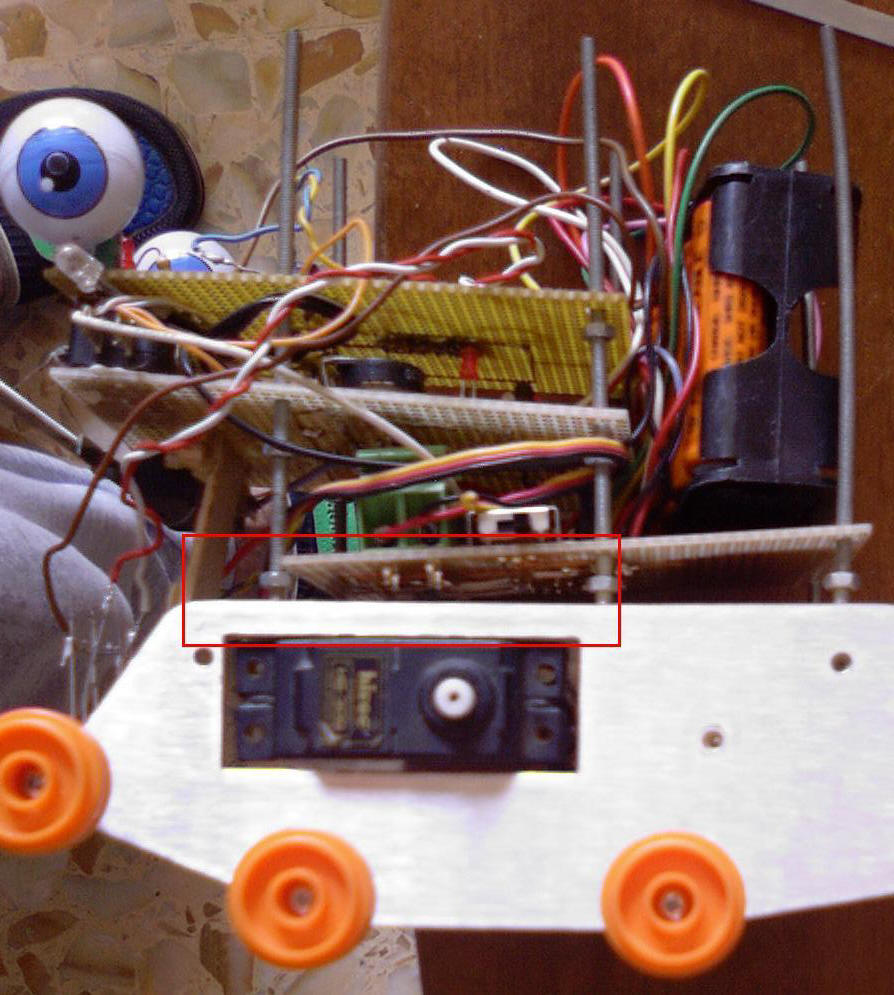
Incollate la parte anteriore della struttura in alluminio
con il legno, per intenderci quella sopra i servi segnata in rosso.
Fate lo stesso per la seconda struttura, in modo da avere una cosa del genere.
Prendere la corona dentata e fissate la squadretta rotonda con delle viti, vedi foto.


Adesso montate il cingolo di gomma nella struttura ed infine la ruota dentata come in foto.
Ricordatevi che ora i sensori sono più alti del dovuto e quindi vanno abbassati.
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.