Ogni microrobot deve essere autonomo, deve riuscire a
"capire" l'ambiente circostante e reagire di conseguenza.
Per il momento il nostro microrobot si può solo spostare
ma non può capire l'ambiente circostante.
E' come se noi prendiamo un cervello e gli colleghiamo
solo le gambe, si muove ma non sa se incontra un' ostacolo o se riesce a
passare in determinati spazzi.
Possiamo risolvere il problema con i sensori.
Di sensori ne esistono molteplici, noi vedremo solo
quelli che si serviranno per costruire il microrobot.
DEVIATORI MECCANICI:

Questo deviatore, (chiamato anche switch) lo potete reperire
nei negozi di elettronica o smontare da una qualunque apparecchiatura, in
sintesi sono facili da trovare.
Vediamo il funzionamento:
Ci sono 3 contatti (a volte sono 2).
Sul contenitore dello switch troverete delle scritte: NA - NC - C.
C = Comune
NA= Normalmente aperto (a volte trovate NO)
NC= Normalmente chiuso.
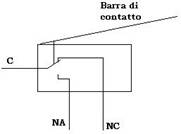
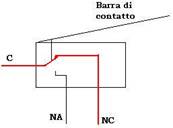
Il funzionamento è semplice, quando la barra di contatto
è a riposo cioè non incontra nessun ostacolo, C ed NC sono uniti (ROSSO),
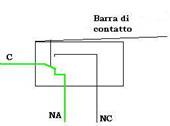
quando la barra di contatto è premuta, ovvero è presente un ostacolo C e NA
sono uniti (VERDE).
Vediamo come collegarli al nostro microrobot.
Il PIC 16F84 è dotato di 13 piedini che possono essere
usate come uscite od ingressi.
Per uscite si intendono tutti quei piedini che permettono
al PIC di comandare delle apparecchiature esterne.
Per esempio i piedini che abbiamo usato per i motori sono
tutte uscite.
Il PIC porta a livello basso od alto le uscite e pilota
l'integrato L293 che a sua volta va a pilotareĀ i servi.
Per ingressi si intendono quei piedini che permettono al
PIC di prelevare delle informazioni dall'esterno.
I sensori meccanici che abbiamo appena visto li
collegheremo ad i piedini di ingresso.
Come prima cosa dobbiamo collegare dei fili lunghi circa
20 cm a tutte le uscite, questo ci facilita il lavoro in seguito.
Il colore dei fili non è importante, l'importante è
ricordare a quale piedino corrispondono.
Numero dei piedini e colore del filo.
Colore -------------------- Piedino ----------------------------Porta
Rosso ------------------------- 3 ------------------------------RA4
Verde ------------------------- 6 ------------------------------RB0
Giallo ------------------------ 7 ------------------------------RB1
Nero -------------------------- 8 ------------------------------RB2
Viola ------------------------- 9 ----------------------------- RB3
Bianco ----------------------- 10 ----------------------------- RB4
Arancione -------------------- 11 ----------------------------- RB5
Marrone ---------------------- 12 ----------------------------- RB6
Rosa ------------------------- 13 ----------------------------- RB7
RA0-RA1-RA2-RA3 sono stati collegati ai motori.
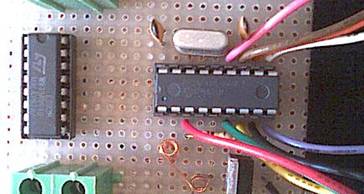
Passiamo a modificare i deviatori, con la carta vetrata grattate
l'estremità della staffa in ferro fino a togliere tutta la placcatura, in questo
modo possiamo saldare del filo di ferro o tubicino come in foto.
A volte non si riesce a saldare il filo di ferro od il
tubicino, si può però incollare o fermare con qualunque modo vi venga in mente.

Io ho utilizzato delle barre filettate che mi erano
avanzate e le ho incollate con della colla epossidica.
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.