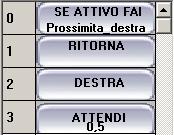
Se invece il microrobot incontra un ostacolo a destra, verrà
eseguita l'istruzione alla riga zero (ATTIVO VAI A Prossimità_destro).
Questa istruzione farà saltare il programma alla griglia
presente nella scheda "Prossimità destra" ed eseguirà le istruzioni trovate, in
questo caso:
INDIETRO
ATTENDI 0,5
RUOTA A DX
ATTENDI 0,5
NB: Quando il sensore destro è attivo l'ostacolo si trova
a sinistra e viceversa, questo è dovuto al fatto che i sensori sono incrociati.
Queste istruzioni faranno indietreggiare il microrobot
per 0,5 secondi, lo faranno ruotare a destra per altri 0,5 secondi.
Finite tutte le istruzioni il programma risalterà alla
griglia principale ed eseguirà l' istruzione successiva, in questo caso "ATTIVO
VAI A Prossimità_sinistra".
L'istruzioni VAI A 0 ci permette di testare continuamente
i sensori.
Se togliamo questa istruzione, quando partirà il
programma, testerà subito i sensori poi andrà avanti e si fermerà all'ultima
riga.
Questo vuol dire che, non verranno più controllati i
sensori e se il microrobot si scontrerà con un ostacolo non se ne accorgerà.
Creando un ciclo, i sensori vengono controllati in
continuazione e quindi il microrobot saprà sempre se ha un ostacolo di fronte
oppure no.
Se vogliamo che il nostro robot una volta individuato un
ostacolo lo spinga, dovremmo utilizzare un programma che di solito si utilizza
con i "lottatori di sumo".
I lottatori di sumo sono dei microrobot che si spingono a
vicenda fino a quando uno dei due non è uscito dal ring.
GRIGLIA PRINCIPALE

GRIGLIA PROSSIMITA' DESTRA
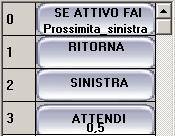
GRIGLIA PROSSIMITA' SINISTRA
Come potete notare adesso il microrobot, quando rivelerà
un ostacolo controllerà lo stato dell'altro sensore, se il sensore opposto non
sarà attivo allora girerà altrimenti tramite l'istruzione RITORNA, tornerà alla
griglia principale.
Se tutti e due i sensori saranno attivo il microrobot
andrà avanti spingendo l'ostacolo.
Ora il nostro microrobot può sentire gli ostacoli che lo
circondano e "decidere" se evitarli o spingerli.
Questo è un primo approccio sui sensori da montare sul
microrobot.
Noi abbiamo usato un livello alto per segnalare la
presenza dell' ostacolo, cioè quando la tensione si sposta da zero a 1, ( il
massimo che in questo caso sono 5V) esiste un ostacolo.
Vengono utilizzati altri tipi di approccio, per esempio
si potrebbe tenere il segnale a livello alto (5V) e segnalare un ostacolo quando
scende a zero.
Non è difficile da fare basta invertire i fili NA e NC
dello switch.
Attenzione però, bisogna poi cambiare anche le istruzioni
del programma sulla griglia principale:
Sostituire SE ATTIVO VAI A con SE DISATTIVO VAI A.
Tutto questo discorso è per farvi capire che non è
importante il tipo di segnala ma come viene interpretato.
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.