Collegato il tutto, fissiamo la basetta con i dadi e sviluppiamo
il programma per testarlo.
Aprite MONTYPLUS e scrivete il programma
riportato qui di seguito.
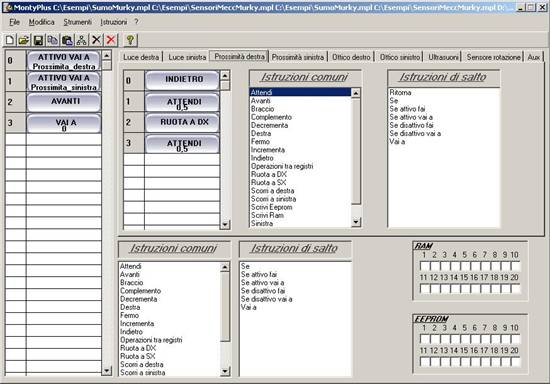
Analizziamo il programma principale, cioè la prima
griglia a sinistra:
Il programma ha solo 4 istruzioni:
1) ATTIVO VAI A Prossimita_destra
2) ATTIVO VAI A Prossimità_sinistra
3) AVANTI
4) VAI A 0
La prima istruzione controllo il sensore meccanico destro
e se è attivo salta alla griglia prossimità_destra.
La seconda operazione controlla il sensore meccanico
sinistro e se è attivo salta alla griglia prossimità_sinistra
La terza istruzione fa camminare aventi il microrobot e
la quarta genera un loop, ovvero torna all'istruzione 1.
Supponiamo che i sensori destra e sinistra non siano
attivi (ovvero non toccano nessun ostacolo), il programma leggerà l'istruzione
alla riga 3 e farà camminare il microrobot.
News
![]() Aggiunta il link al corso Linux Uno su Udemy.
Aggiunta il link al corso Linux Uno su Udemy.
![]() Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.
Aggiunto il tutorial per la realizzazionedi un Arcade con materiale di riciclo.